







M.A.R.S. Rover Robot for Microbit or Pi Zero
M.A.R.S. Rover Robot
AVAILABLE FOR EITHER MICROBIT OR RASPBERRY PI ZERO
NB. Microbit, Pi Zero are NOT included
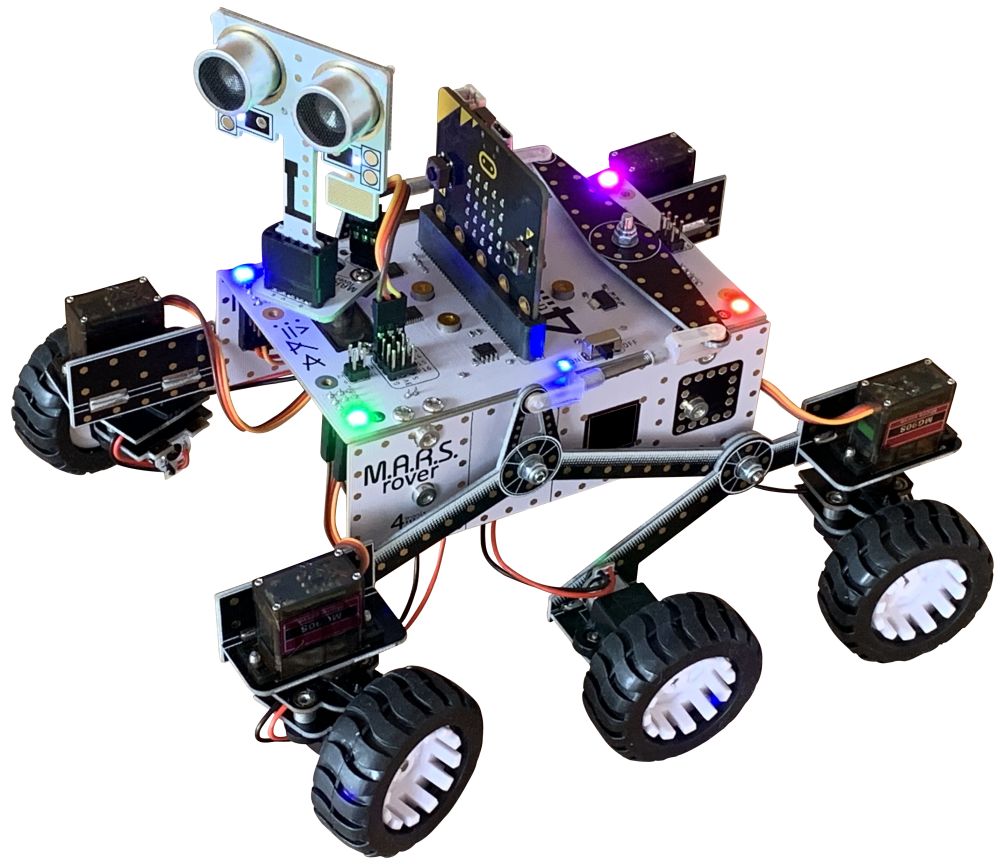
The 4tronix M.A.R.S. Rover is loosely based on the Curiosity and Mars 2020 Perseverance rovers from NASA/JPL. It uses the same rocker arm, bogey and differential arm mechanism.
Mobile
Autonomous
Robotic
System
Note: Pi Zero versions shipped from 14th April 2021 include higher mounting point for Pi Zero so it clears the differential arm better, as well as a new Mast Head that accepts Raspberry Pi Cameras so you can easily mount a rotating camera on your M.A.R.S. Rover.
Some stats on the 4tronix M.A.R.S. Rover
- 6 Motors. 80 rpm 6V, N20 micro gear motors
- 4 Servos. MG90S metal gear analog micro servos
- 4 FireLeds
- Ultrasonic distance sensor on steerable mast
- Total number of special PCBs: 30
- Number of different PCB designs: 11
- Length: 200mm
- Width: 185mm
- Height without Mast and Microbit: 95mm
- Height with Mast: 170mm
- Weight excluding Pi/Microbit and batteries: 460g
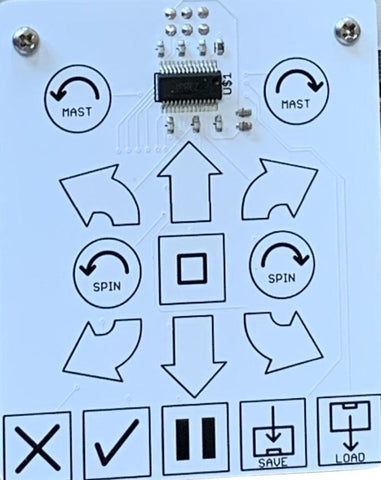
There is a Makecode extension that makes it easy to control the unit. A Python library module is available for the Raspberry Pi Zero.
NOTE: The M.A.R.S. Rover requires 4 good quality rechargeable batteries (not included). We recommend Energizer Extreme or Eneloop. This link provides 4 great batteries and a fast charger.
See our blog entry for details of assembly and coding
You should allow 2 hours to build this if you are used to assembling kits of this nature. If it is your first assembly of something like this, then you may have to double the expected timeframe.
The main board is the only difference between the 2 models. You can also purchase the main boards separately, so could quickly swap from Microbit to Pi Zero, or vice versa, with just a few screws.